2018年度の東大機械系4年生向けのオープン・ラボを下記の通り行います。新4年生の皆さん、奮ってご参加ください。
日時:
(1回目)4月5日(木)15:00 ~ 16:00
(2回目)4月6日(金)13:00 ~ 14:00
場所:工学部2号館1階サイバービヘイビア・スタジオ
Department of Mechano-informatics, University of Tokyo
2018年度の東大機械系4年生向けのオープン・ラボを下記の通り行います。新4年生の皆さん、奮ってご参加ください。
日時:
(1回目)4月5日(木)15:00 ~ 16:00
(2回目)4月6日(金)13:00 ~ 14:00
場所:工学部2号館1階サイバービヘイビア・スタジオ
Mr. Takuya Ohashi (master course student) was awarded Miura Award from the Japan Society of Mechanical Engineers.
大橋 拓也 君が日本機械学会三浦賞を受賞しました。

The 3rd Seoul National University – University of Tokyo Joint Workshop was held on Feb. 19 and 20 at Seoul National University.
Date: 2/17/2018 (Sat)
Location: University of Tokyo Hongo Campus, Engineering 2 Building
恒例の先端機構制御研究会と同窓会を2月17日(土)に下記のように開催します。同期の方々とお誘い合わせのうえ、またご家族でお気軽にご参加いただければ幸いです。
続きを読む →
YNL cooperated with a motion capture measurement of Mima Ito, a ping-pong player, as a part of a TV program “Tokyo Athlete” that was broadcast by NHK on Jan. 10th.
https://www6.nhk.or.jp/special/detail/index.html?aid=20180110
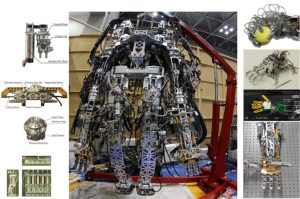
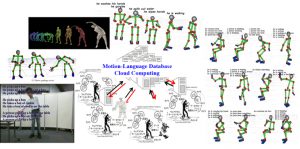
東京大学 中村・山本研究室へようこそ。以下の3つのテーマを中心に、ロボットの力学と制御の研究を行っています。
We are involved in the following topics on robotics, dynamics and control.

Also see our YouTube channel “robotics_ynl.”
We relaunched our WEB page.
研究室のWEBページをリニューアルしました。